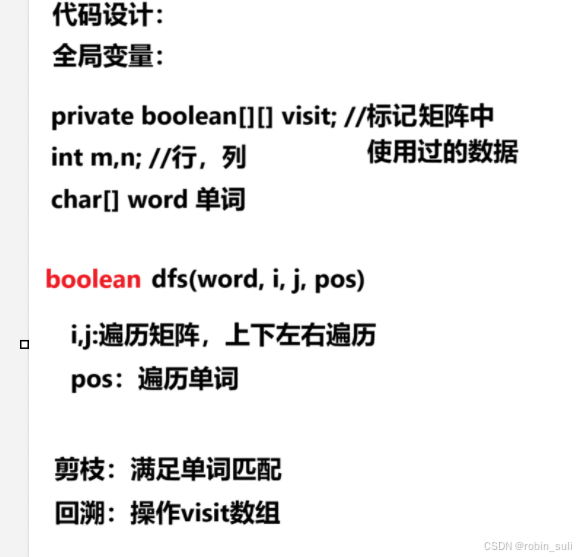
classSolution{privateboolean[][] visit;//标记使用过的数据int m,n;//行,列char[] word;publicbooleanexist(char[][] board,String _word){
m = board.length;
n = board[0].length;
visit =newboolean[m][n];
word = _word.toCharArray();for(int i =0; i < m; i++)for(int j =0; j < n; j++){if(word[0]== board[i][j]){
visit[i][j]=true;if(dfs(board,i,j,1))returntrue;
visit[i][j]=false;//恢复现场}}returnfalse;}int[] dx ={0,0,-1,1};int[] dy ={-1,1,0,0};booleandfs(char[][]board,int i,int j,int pos){if(pos == word.length){returntrue;//搜索成功}for(int k =0; k <4; k++){int x = i + dx[k];int y = j + dy[k];if(x >=0&& x < m && y >=0&& y < n &&!visit[x][y]&& word[pos]== board[x][y]){
visit[x][y]=true;if(dfs(board,x,y,pos+1))returntrue;
visit[x][y]=false;//恢复现场}}returnfalse;}}
一、 rect.rs源码
// Copyright 2013 The Servo Project Developers. See the COPYRIGHT
// file at the top-level directory of this distribution.
//
// Licensed under the Apache License, Version 2.0 <LICENSE-APACHE or
// http://www.apache.org/licenses/LICENS…
基本概念
SLAM 即 Simultaneous Localization and Mapping,中文名为同时定位与地图构建,是机器人、自动驾驶、增强现实等领域中的关键技术。
在未知环境中,搭载特定传感器的主体(如机器人、无人机等)在运动过程中&am…